최종업데이트 : 23/10/2024
조회수 :
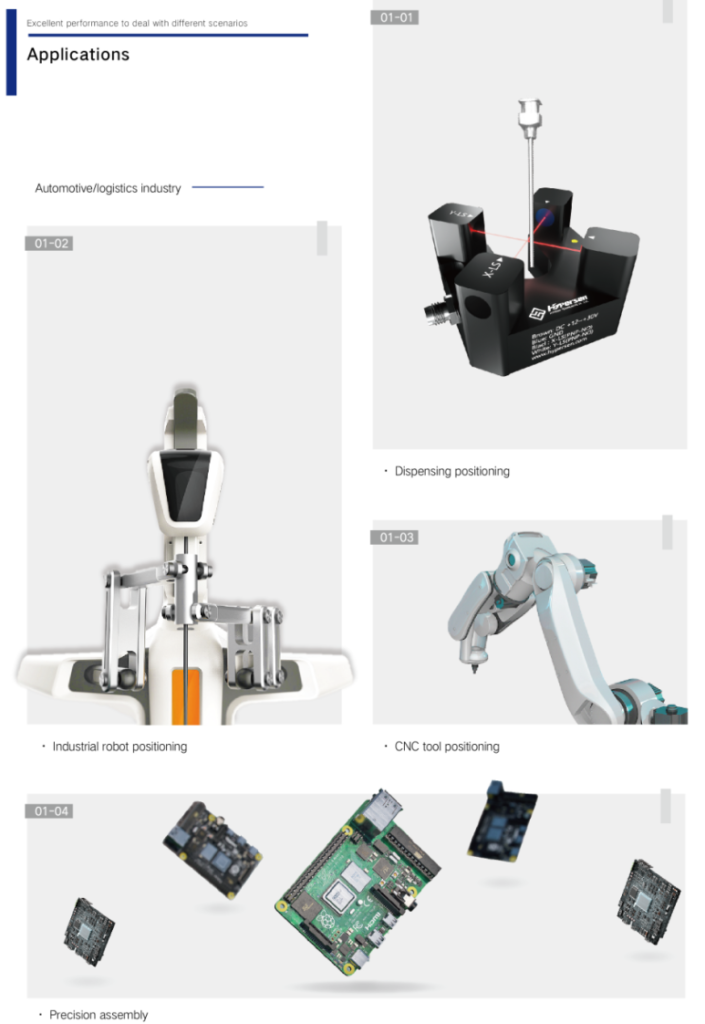
[적용사례#2]Hypersen, 하이퍼센, 레이저 크로스 빔센서
레이저 크로스 빔센서 측정 원리 레이저 크로스 빔센서는 디스펜싱 및 CNC 툴의 정위치 칼리브레이션(보정)시에 적용되는 센서이다. 적용원리는 두 개의 크로스 […]




table of contents
레이저 크로스 빔센서 측정 원리

레이저 크로스 빔센서는 디스펜싱 및 CNC 툴의 정위치 칼리브레이션(보정)시에 적용되는 센서이다. 적용원리는 두 개의 크로스 빔을 통과하는 니들의 경로를 센서가 파악하고 두 레이저 빔의 교차점에서 출력이 나는 방식이다.
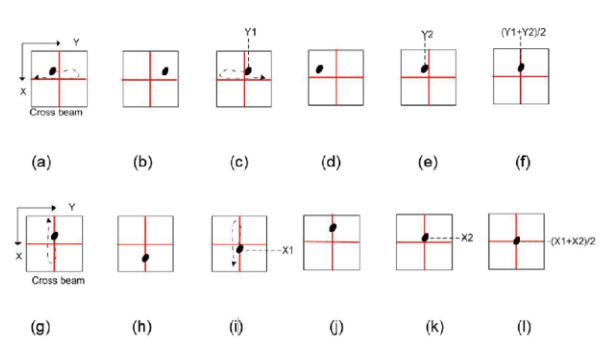
디스펜서 위치 설정을 예로 들면, 로봇은 분배 바늘이 센서의 중심 주위를 탐색하도록 안내한 후 Y축을 따라 오른쪽에서 왼쪽으로 이동시킨다. 바늘이 레이저 빔에 처음 닿았을 때의 위치를 Y1, 그리고 바늘이 빔을 막 떠난 위치를 Y2로 기록한다. 따라서 바늘의 Y 방향 중심 위치는 (Y1+Y2)/2의 좌표가 된다. 같은 방법으로 아래 그림과 같이 X축의 중심 위치를 구할 수 있는데 (X1+X2)/2이다. 바늘의 중심점을 X, Y 방향으로 위치시킨 후 위로 올려 두 개의 레이저 빔이 동시에 사라지거나 나타나는 위치인 Z축을 따라 영점을 찾는다. 위의 단계를 통해 물체의 영점을 파악할 수 있다.
레이저 크로스 빔센서 적용사례
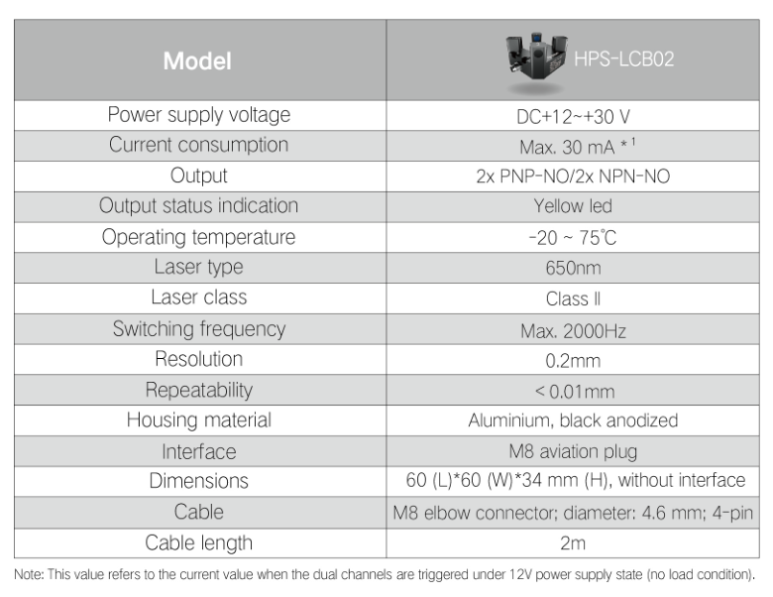
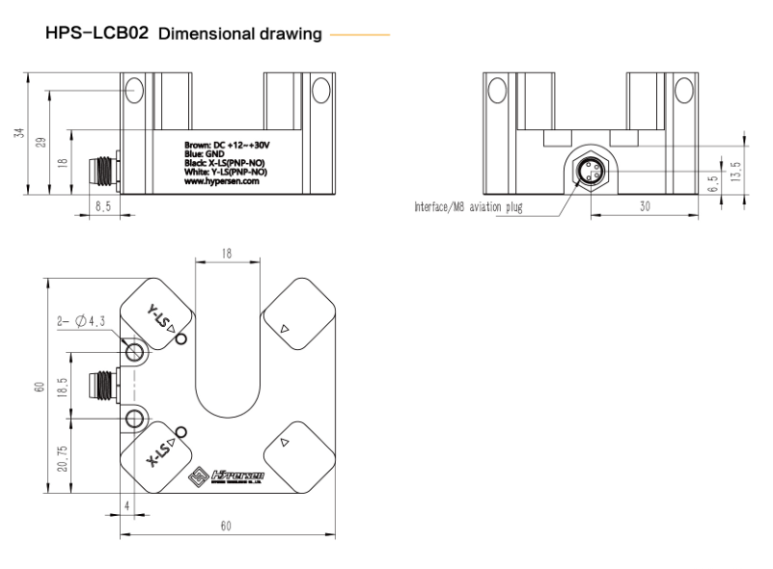
제품사양 및 외형치수도